The rapid advancement of autonomous vehicles (AVs) and Advanced Driver Assistance Systems (ADAS) is transforming the future of mobility. As vehicles become increasingly automated, ensuring their safety, reliability, and performance in real-world conditions is paramount. However, traditional road testing is no longer sufficient due to high costs, safety risks, and the sheer complexity of testing all possible scenarios. The industry is now shifting towards simulation-driven validation, enabling scalable and efficient testing in controlled environments.
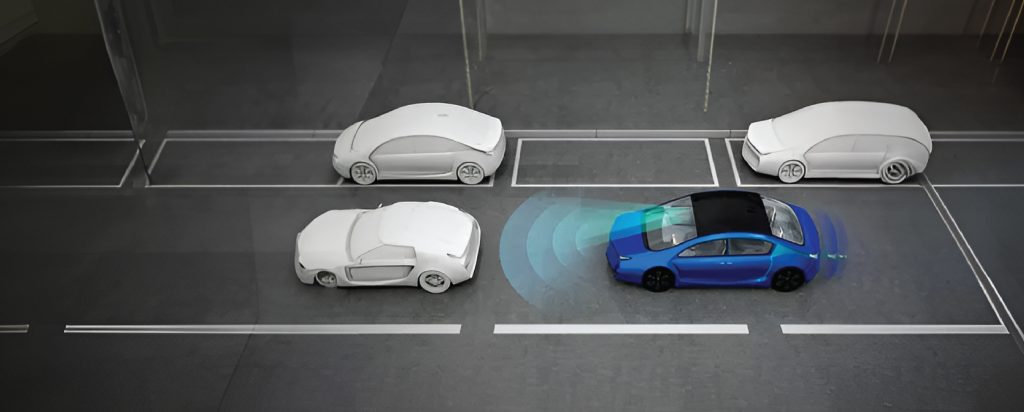
One of the key challenges in AV validation is achieving realistic sensor simulation that accurately reflects the uncertainties of real-world driving conditions. Ansys AVxcelerate, a powerful physics-based simulation tool, provides high-fidelity sensor modeling and scenario-based testing—crucial for validating L2+ and higher-level autonomy. In this blog, we explore the key trends in autonomous systems testing, the limitations of ideal sensor outputs, and how Ansys AVxcelerate bridges the gap to enable safer and more reliable autonomous vehicle deployments.
Autonomous vehicle validation is transitioning from costly and time-intensive real-world tests to simulation-based methodologies. This shift is crucial to accelerating ADAS development while ensuring compliance with ISO 26262 and other safety standards. The three primary approaches driving this transformation include:
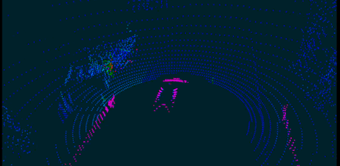
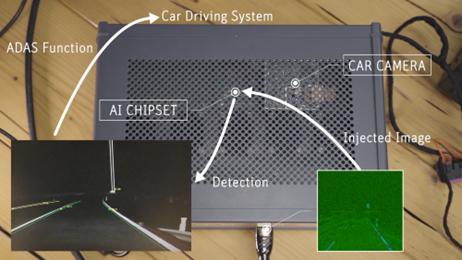
Traditional AV simulations often assume ideal sensor data, which does not account for real-world sensor limitations. However, perception accuracy is significantly impacted by environmental factors and sensor-specific challenges, including:

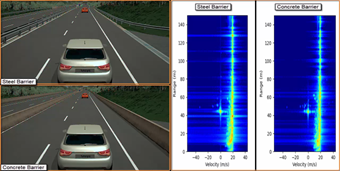

By accurately simulating sensor imperfections, Ansys AVxcelerate ensures that AI perception models are trained on realistic data, leading to improved real-world performance.

As L2+ and higher-level autonomous systems become more prevalent, the need for real-world stochastic sensor validation grows. Traditional simulations that assume ideal sensor performance are no longer sufficient. Ansys AVxcelerate bridges this gap with its physics-based sensor modeling, scalable scenario testing, and regulatory compliance validation, making it an essential tool for the future of autonomous vehicle testing.